In system design, assumptions that facilitate the usual process can lead to highly unsatisfactory performance “off piste”.
In this exploratory exercise, the original design brief stated a premise about the “fitness-for-purpose” and “quality” (concepts borrowed from the Australian Consumer Law) of communications in medical healthcare systems. The “prototype system” that was built, is an attempt to emulate and educate upon, the issues identified by the premise. It is the first stage in the test process for the premise as described by scientific method (Magee, 1975).
The premise was formulated on the basis of observations made of medical services provision over a period of fifteen years in both the UK and Australia. While the encounters were few in number, complications caused by inadequate communication were almost ubiquitous.
1.1 In Scope
The scope for the prototype was described in the design brief.
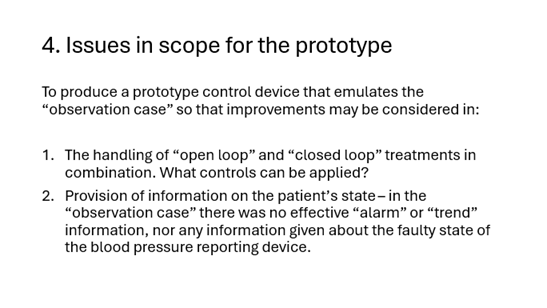
Figure 1 From the Design Brief
Both issues in “4. Issues in scope for the prototype” were addressed in the features of system.
1.1.1 Handling of variables as “Open Loop” and “Closed Loop”
The system deployed handled the relationship between three variables o, c and m. There were two “conditions” for the system, chosen by an observer using a toggle switch. The two conditions can be described as “stable” and “unstable”.
In the “stable” condition, the values of o and c are modulated within an upper and lower bound. In the “unstable” condition, o is forced to a “pathological” value for the system e.g. the carburettor floods, a medical treatment causes an unforeseen response and c can be modulated by the user. The upper and lower boundary and proximity values and the “pathological” value determination are programmed and configurable in the system.
The changes in the three variables are presented as a digital display, one graph per variable. The dependent variables o, c, and m occupy the y-axis. The independent variable, time, occupies the x-axis.
When the value of m, moves outside its preset upper and lower boundary value, or within the preset proximity to these boundary values, the visual display changes and an alarm is sounded.
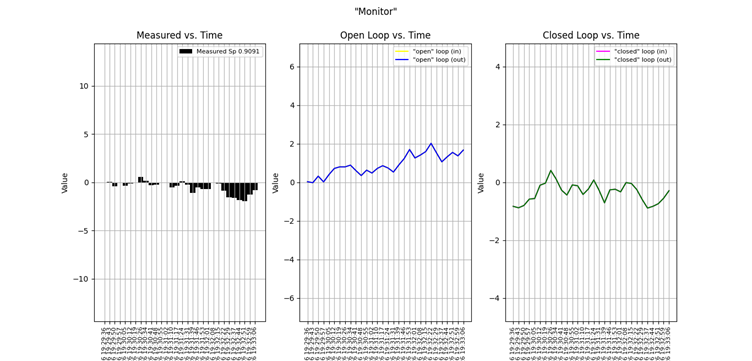
Figure 2 The display of m, o and c in the stable condition
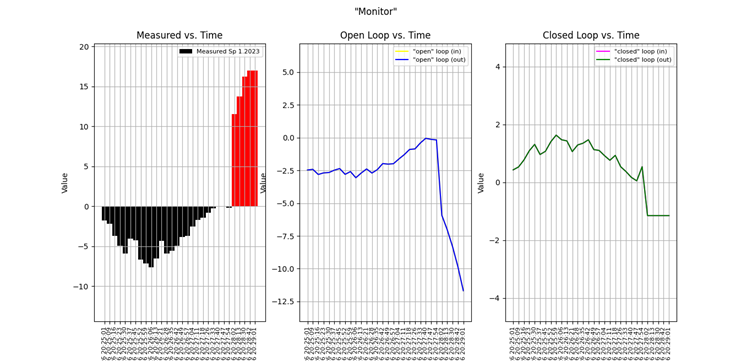
Figure 3 The system in an unstable state, with o sent to a pathological value for the system. c has been adjusted in an attempt to stabilize m. An alarm is sounded as a delinquent value of m displayed.
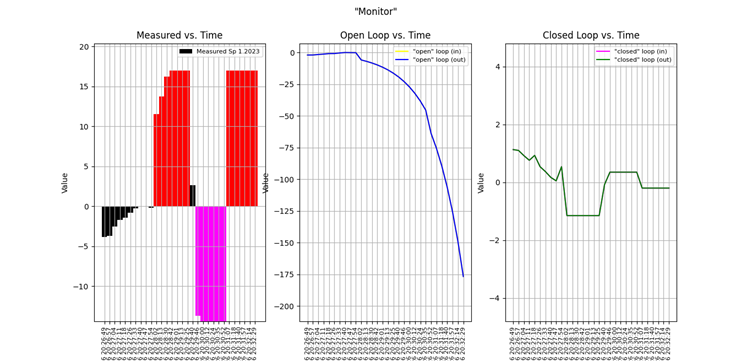
Figure 4 Variation in m following adjustment in c. However, in the unstable state, it is the “assumed” open loop variable o that is driving m out of boundary. c is helpless.
1.1.1.1 The variables o, c and m
The behaviour of the three variables is intended to demonstrate “cybernetic effects” in the system.
- m, the measured variable. This is the output variable that is intended to inform the observer of the state of the system. It is a function of the two input variables (o, c). In a real-world controls system, for example in the domestic refrigerator, a “setpoint” would apply to this variable and the controls system would modulate a closed loop variable, in the example, with the chiller, to bring the measured variable to the setpoint. An elementary “setpoint” seeking algorithm (in a python “placeholder” function) was implemented for the “demo” targeting a value by the modulation of “c”, specified by the analogue input from a potentiometer on the Arduino controller.
- o – the open loop variable. This variable is an input to the system and is uncontrolled by any other input. It can be said to be “assumed to act as per specification” for the purpose of the system. An example is the quantity of fuel injected into the combustion chamber of a petrol engine by a carburettor.
- c – the closed loop variable. This input variable can be adjusted by a potentiometer interfaced through the Arduino controller when the user set the system to the “unstable” status. Thus, it is able to influence the value of m.
1.2.1 Presentation of System Behaviour
The design brief premise suggested that in the observed case a pathological state emerged for the patient that relied on the patient to communicate that state with the engaged professional. To initiate debate on the acceptability of such a circumstance is a purpose of the system.
Warren Weaver in his introduction (Weaver, 1949) describes three levels of communication problem and the relationship between them:
“Level A. How accurately can the symbols of communication be transmitted?
Level B. How precisely do the transmitted symbols convey the desired meaning?
Level C. How effectively does the received meaning affect conduct in the desired way?”
The “technical” problem as addressed by Shannon (Shannon, 1949) is the first consideration. “Level A” – Are the messages, constituted by “symbols of communication” (a tenable general description of data) accurately carried by the designated equipment to the recipient? If not, why not?
“Level B” and “Level C” are the province of semiotics, as per “The Theory of Semiotics” by Umberto Eco, 1976, Indiana University Press (Eco, 1976).
It can be argued that “Level B” can only be judged by an evaluation of “Level C”. Let us imagine that one thousand instances of a message are accurately transmitted and received as per “Level A”. What is the expected response to be invoked in the recipient? What is the acceptable percentage of actual responses that match the expected response that will tell us that the “desired meaning” was transmitted? The nature and disposition of the recipients of the message must be considered. For example, a king parrot is perfectly capable of communicating to a human being that it requires to be fed. It is unclear that the process works in the reverse.
If a child is told not to cross the road in front of a vehicle, then the message must generate the expected response on one hundred per cent of occasions. In other circumstances, a complete fidelity of response to intention may be less vital.
The system has enabled some first small steps in the evaluation of appropriate communication methods.
- The use of a graphical display including bars to display m, o and c in contrast to a single value, opens the door to trend display against boundary and proximity conditions.
- The use of a sound alarm introduces messaging to a second sense.
Of course, these are hardly new explorations but the importance of accurate and timely communication to system performance can never, ever be discounted.
1.2 Out of Scope
The following issues were not actively addressed as per the Design Brief but were considered during the development of the prototype and in conversations with associated professionals[3].
Figure 5 From the Design Brief; 5.1 in fact is demonstrable by the prototype
1.3 Current State and Future Work
The build exercise pointed to the work of W. Ross Ashby. Further reading of his work may suggest paths of future work, particularly for the emulation of cybernetic systems that are observed in the world.
In the meantime, the following can be considered:
- The introduction of various “setpoint” seeking algorithms and an observation of the system behaviours that result from the modulation of c, the closed loop variable, in response to the value or derivatives of the measured value e.g. rate of change, of m. Algorithm selection and configuration could be automated by the ingestion of a specification from a repository of such.
- The use of “AI” training to introduce pattern recognition applied to the behaviour of the variables into the handling of alarm communication.
- An original intention was to automate the transition from “stable” to “unstable” condition by the behaviour of the variables i.e. a given pattern, for example where o exceeds a boundary for a given period, would change the condition of the system, that is to say the function of m as determined by o and c. This might have been achieved by the randomised introduction of error into the radio signalling by the Micro:Bits that could change the value of o and c in transit, breaking the assumption of their effect, to their destiny as factors in the calculation of m. As described in the build journey this effect was achieved by serendipity though further formalisation was not possible in the time available. This effect might be an emulation of the debated case where in the administration of an “mRNA vaccine” (sic) dose, the assumption is that the dosage acts only upon tissues local to the injection but in fact becomes systemic within the patient.
It is possible to conceive of the system as a programmable “primitive” for the exploration of cybernetic effects and systems. A “primitive” enhanced as discussed could be networked in numerous ways as a simulation or to create a system itself. Null o and c variations can be configured. Such systems would be very cheap and easy to deploy and as they can be deterministic where required i.e. randomizing effects can be configured out, can be used where probabilistic “AI” engines are not suitable.
Reading
From Cybernetics to Machine Organization by Hiro Taiyo Hamada 2025